Connecting PS3 to Arduino – Part 1
This is a short description how to connect PS3 Remote to Arduino
Basically what you need is these things:
1. PS3 remote
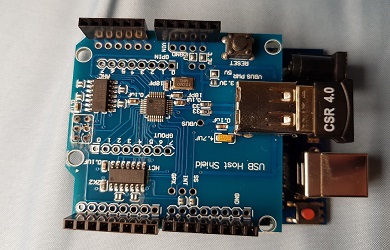
2. USB shield for Arduino
3. Correct dongle in the link below
4. The correct Code to use
Links Amazon:
Buy on Amazon Arduino Mega: Amazon Mega
Buy on Amazon Arduino Uno: Amazon Uno
Buy on Amazon Arduino Nano: Amazon Nano
Buy on Amazon Arduino 33 IOT: Amazon 33 IOT
Buy on Amazon Arduino Nano ESP32: Amazon Nano Esp32
Links Aliexpress:
Buy on Aliexpress Arduino Mega: Aliexpress Mega
Buy on Aliexpress Arduino Uno: Aliexpress Uno
Buy on Aliexpress Arduino Nano: Aliexpress Nano
Buy on Aliexpress Arduino 33 IOT: Aliexpress 33 IOT
Buy on Aliexpress Arduino Nano ESP32: Aliexpress Nano esp32
Links Ebay:
Buy on Ebay Arduino Mega: Ebay Mega
Buy on Ebay Arduino Uno: Ebay Uno
Buy on Ebay Arduino Nano: Ebay Nano
Buy on Ebay Arduino 33 IOT: Ebay 33 IOT
Buy on Ebay Arduino Nano ESP32: Ebay Nano esp32